AUTOSAR 入门教程(1)基础篇一
AUTOSAR 作为汽车电子领域的行业标准,解决了传统 ECU 软件开发中 代码复用率低 和 跨平台移植困难 的核心痛点。本文将系统解析其分层架构设计,帮助开发者快速建立认知框架。
1️⃣ AUTOSAR 架构概述
AUTOSAR(AUTomotive Open System Architecture)是汽车电子控制单元(ECU)的开放式软件架构标准,其核心价值在于:
- 通过 分层设计 实现硬件与软件解耦
- 标准化接口提升 代码复用率(最高可达 70%)
- 支持 分布式开发 模式
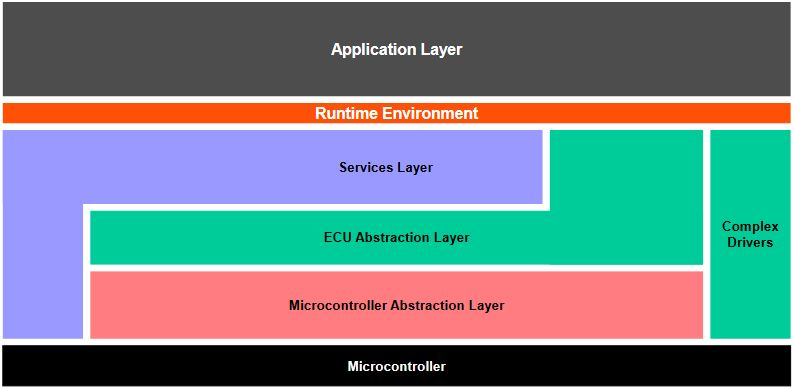
2️⃣ 基础软件层(BSW)解析
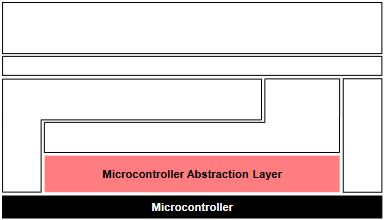
2.1 微控制器抽象层(MCAL)
作为最底层硬件接口,MCAL 的关键特性包括:
- 直接操作寄存器控制硬件外设
- 提供标准化 API 屏蔽芯片差异
- 包含 CAN、PWM、ADC 等基础驱动
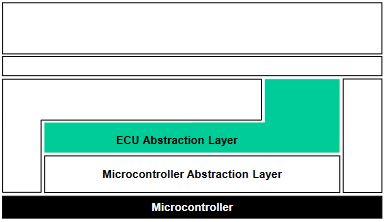
2.2 ECU 抽象层
向上层提供 硬件无关 的 ECU 级服务:
- 板载外设统一抽象(如车载传感器)
- 典型组件:内存管理、通信协议栈
- 与 MCAL 的接口关系:
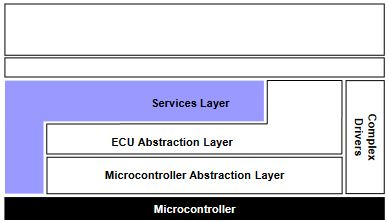
2.3 服务层
提供跨 ECU 的通用服务能力:
- 诊断服务(UDS/OBD)
- 网络管理(CAN FD 调度)
- 加密服务(HSM 集成)
3️⃣ 运行时环境(RTE)关键作用
作为连接 BSW 与应用层的 神经中枢,RTE 实现:
- 虚拟功能总线(VFB)的 ECU 级实例化
- 提供 端口接口 实现组件间通信
- 支持 多核调度 的时序保障
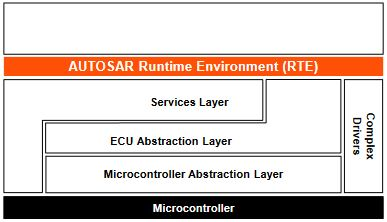
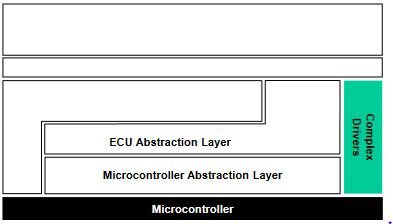
4️⃣ 复杂设备驱动(CDD)特殊场景
对于 高实时性 需求场景:
- 绕过标准 BSW 层直接访问硬件
- 典型应用案例:
- 电机控制(PWM 微秒级响应)
- 雷达信号处理(硬件加速)
- 需手动实现 资源冲突管理
5️⃣ 实战建议
🔧 新项目开发推荐路径:
- 先通过 MCAL 配置工具 生成基础驱动
- 使用 RTE 生成器 定义组件接口
- 最后开发 应用层算法
⚠️ 注意事项:
- CDD 使用会增加移植成本
- 服务层配置需符合 AUTOSAR 版本规范
- 建议使用 Davinci Configurator 等专业工具链